三菱地所(株)は28日~3月15日、新丸の内ビルディング(東京都千代田区)にて、ゴンドラによる高所作業での多関節アーム搭載「多目的壁面作業ロボット」を活用した外窓清掃の実証実験を行なう。日本ビソー(株)との共同実験で、超高層ビルでのこうした実験は史上初だという。
従来の窓清掃は、窓面の大きさに合わせた無人ユニット数台もしくは有人で行なっている。作業ロボットの導入により、清掃性能や効率アップだけでなく、軽量化による汎用性も高めて既存の無人・有人による窓清掃の代替を目指す。
今回、実験で使用するロボットには、人が行なう清掃動作をプログラムしており、自動でスムーズな清掃が可能となる。
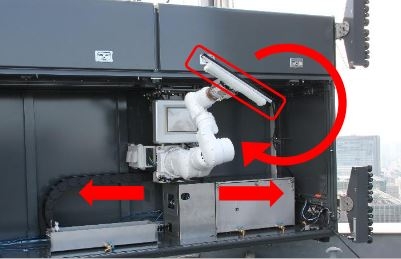
ゴンドラ内には産業用ロボットに用いられる多関節アームを搭載し、横移動させて広い稼働範囲を確保する。ベースシステムと作業ヘッドで構成しており、作業用ヘッドの開発が進めば、窓清掃だけでなく外壁調査や診断、塗装・シール打ち替えなど、多様な用途での活用も実現可能となる。